
TL;DR
최근에 Object Detection (이하 OD) task 관련 kaggle challenge를 하다, 비슷한 대회 solutions들을 보다가 상위 랭크 solution에 VertiFocalNet (이하 VFNet)을 사용한 걸 발견해서, 요 논문을 더 자세하게 공부해 보고 싶어서 정리해 봅니다.
OD 쪽을 오랜만에 공부해 보니 그동안 공부 안 했던 스택이 쌓였는지, 볼 것도 많지만 대회에도 써 보면서 재밌게 공부했습니다.
Related Work
논문에서 제시하는 novelty들에 직/간접적으로 영향을 주거나 관련있는 논문들.
Introduction
OD task에서 높은 성능을 얻으려면 candidate detection를 rank 하는 게 중요한 것 중 하나인데, 이전 연구들은 classification or localization score 등을 candidates를 rank 하는데 사용해 reliable 하지 못하다는 점을 짚으며, 요걸 joint learn 할 수 있는 reliable 한 method, IACS (IoU-Aware Classification Score)를 제안합니다.
이 논문에서 제시하는 novelty는 크게 3가지입니다.
- IACS (IoU-Aware Classification Score)
- VertiFocal Loss
- Star-Shaped Box Feature Representation
Architecture
IACS (IoU-Aware Classification Score)
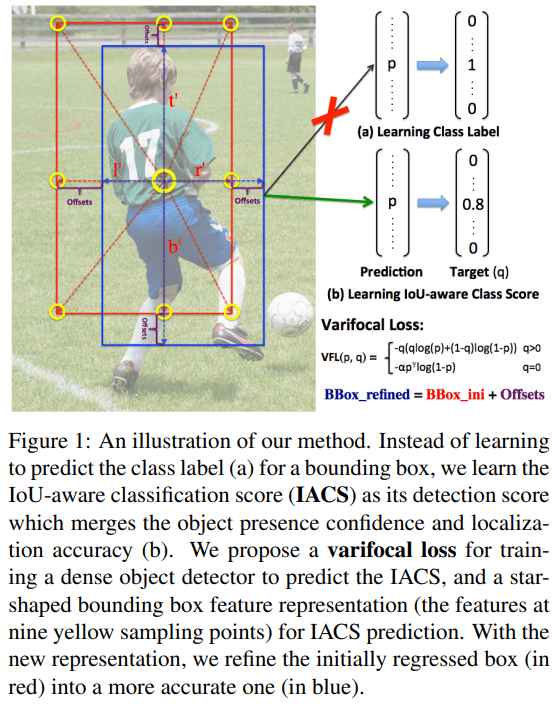
IACS는 classificaiton score vector 인데, 각 값들은 gt and predicted bbox 의 IoU 값이 됩니다. 위에 첨부한 Figure 1 과 같습니다.
VertiFocal Loss
IACS를 탐지하기 위해 VertiFocal Loss를 설계했는데, idea는 Focal Loss에서 가져왔습니다. 이유는 IACS를 regress할 때 imbalance 문제를 해결하기 위해서라고 합니다.
= predicted IACS, = target score
fg (foreground)일 때는, = gt 와 generated bbox 의 IoU bg (background)일 때는, 모든 classes에 대해 target = 0
논문에서 bg 일 때 ( = 0)는 negative examples에 대해서만 factor ()로 scale 하는 이유는, positive exmaples ( > 0)에선 negative exmaples에 비해 rare 하게 등장하기 때문에 scale 하지 않았다고 합니다. 그리고 = 0일 때, 를 scale 해 positive, negative losses 사이에 balance를 잡아줬다고 합니다.
Star-Shaped Box Feature Representation
IACS를 에측하기 위해서 Star-shaped Box Feature Representaion을 개발했다는데, 요약하면 deformable convolution
로 9 개의 bbox points (= Figure 1에 노란 점들)를 표현하는 무언가다.
구체적인 과정은,
- initial bbox, 4 points (x1, y1, x2, y2)를 fixed kernel size의 3x3 convolution으로 찾는다.
- By
FCOS, points들이 4d-vector로 encoded됨. (, , , ).- : distance from sample location (x, y) to left side of the bbox.
- : distance from sample location (x, y) to top side of the bbox.
- : distance from sample location (x, y) to right side of the bbox.
- : distance from sample location (x, y) to bottom side of the bbox.
- 요 것들로 9 points를
Figure 1그림처럼 생성
끝으로 추가적인 예측으로 요런 points들을 생성하지 않아 computation-efficient 라고 캅니다.
Bounding Box Refinement
bbox refinement 과정도 있는데, 기존 dense od에선 비효율적이라 잘 쓰이지 않았지만, 위에 제안한 Star-shaped Box Feature Representation 덕분에 효율적으로 refine이 가능하다고 합니다.
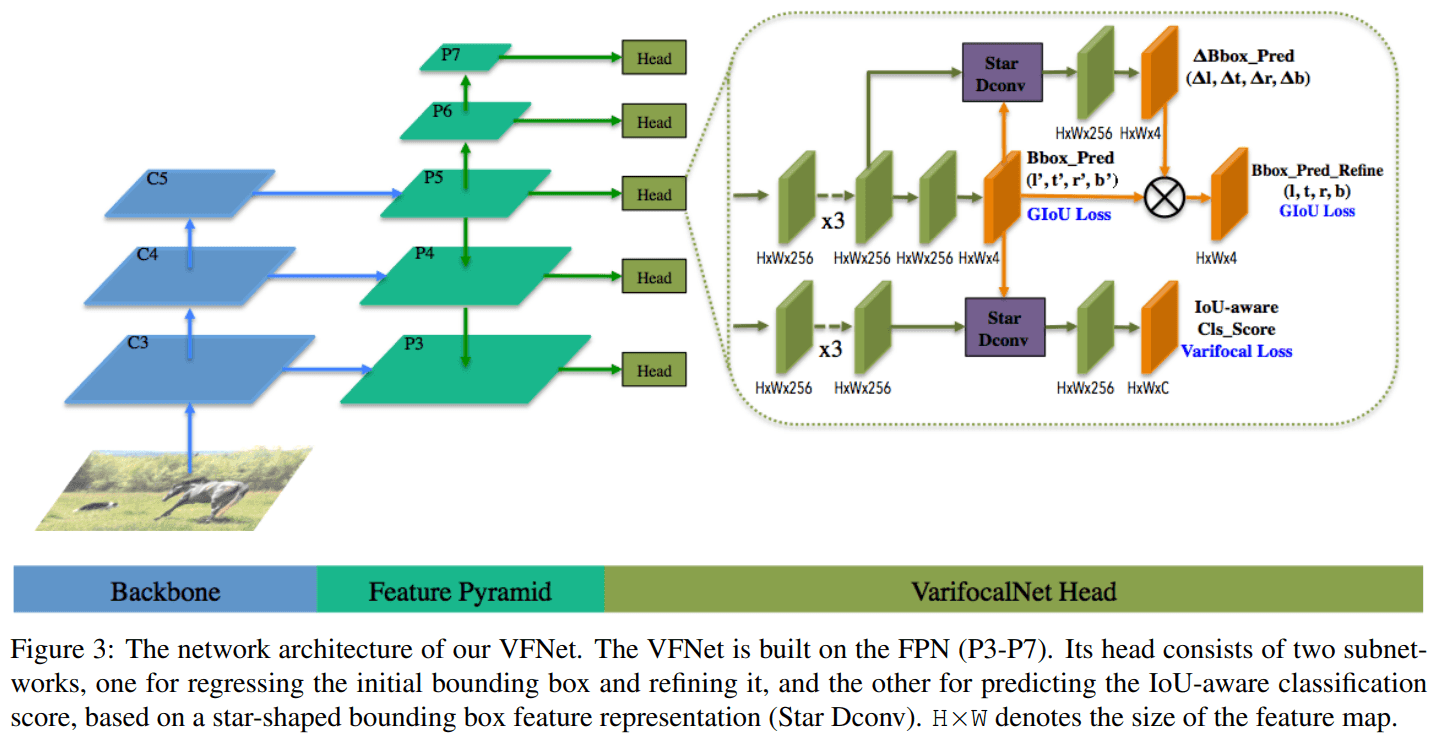
아래 이미지는 전체적인 architecture 입니다.
Train Recipe
Loss
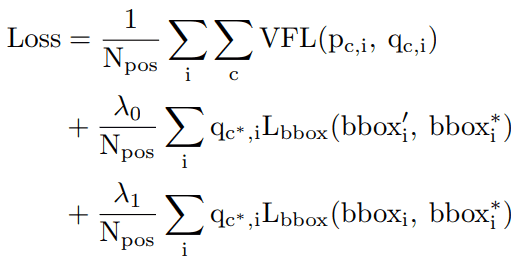
전체 로스는 다음과 같이 정의했는데, VFL + initial, refined bbox 둘 다 loss를 구해서 최소화 하도록 합니다.
Performance
COCO
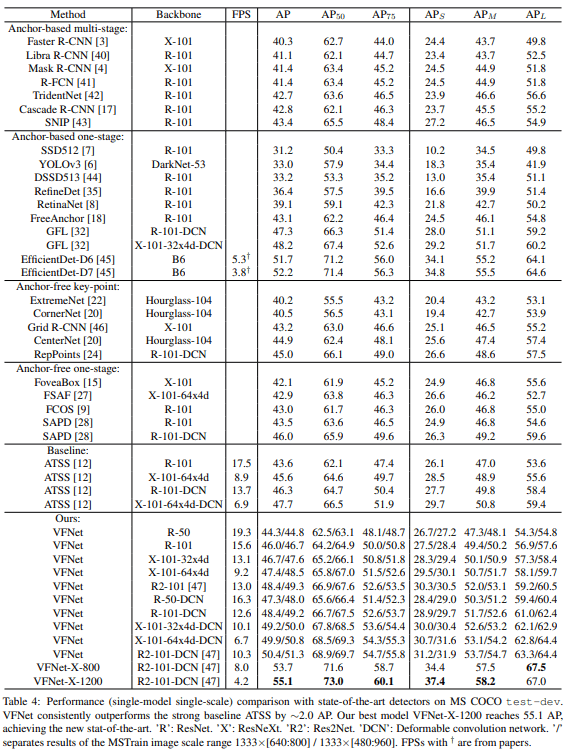
MS COCO에서 AP metric 기준 SotA 달성했다.
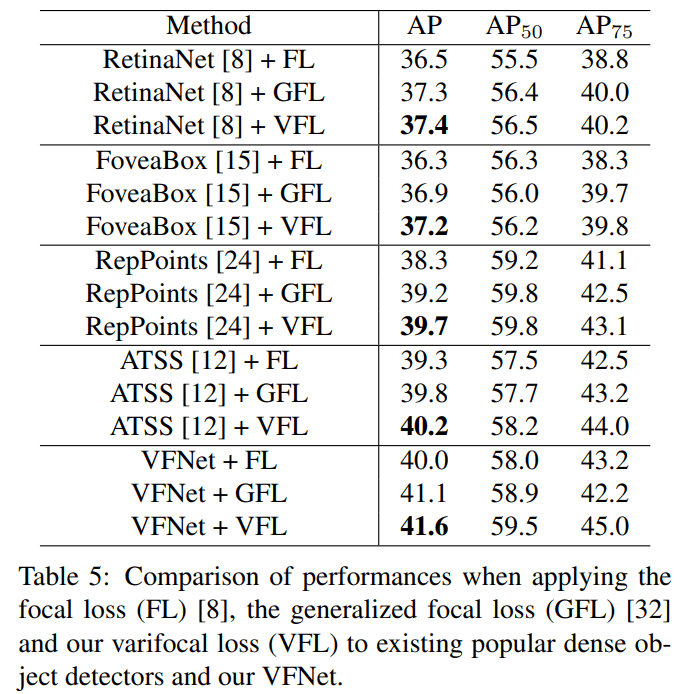
VFL
다른 dense od에 VFL를 적용해 봤을 때, 전반적으로 성능이 올라가는 점도 확인할 수 있었습니다.
Conclusion
20년 기준 SotA AP를 달성했고, 제안한 VFL만 다른 구현체에 적용했을 때 promising 한 performance를 보여줘서 성능적 측면에도 좋아 보였다. 논문에서 제안한 novelty들 설계도 make sense하고 재밌게 봤다.
결론 : 굳굳